Solar Sail Mechanism
Solar sails represent a transformative approach to spacecraft propulsion, utilizing pure radiation pressure for fuel-free navigation across the solar system. By harnessing the constant momentum of sunlight, these structures enable long-duration missions and high-delta-V trajectories beyond the capabilities of conventional chemical systems.
The core engineering challenge for CubeSat-scale solar sails lies in packaging massive reflective membranes into a highly constrained "tuna can" volume. This project details the mechanical evolution of a compact, deployable boom system designed to eliminate conventional failure modes like snagging and jamming through a refined Tri-Boom architecture.
Design Evolution: The Quad Sail
The initial design ("Revision 1") utilized a 4-boom configuration (Quad Sail) to maximize the deployed surface area and maintain symmetry. The booms were thin-walled composite slit-tubes, designed to flatten completely and roll around a central hub.
Although the Quad Sail offers significantly more surface area for propulsion compared to a Tri-Boom design (for a given boom length), the mechanical limitations of the boom cross-section dictated a change. The strain limits of the composite material required a larger coiling radius than the Quad hub could accommodate within the CubeSat form factor.
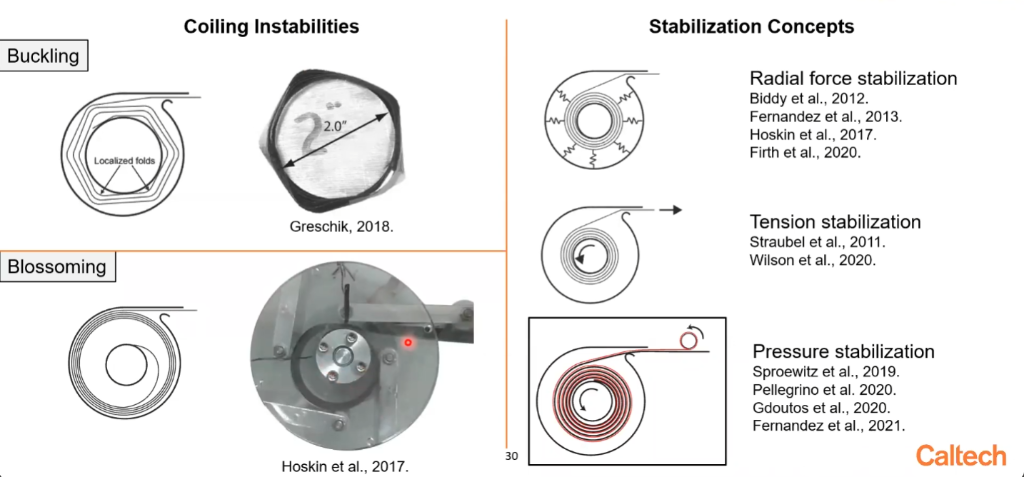
The "Blossoming" Problem
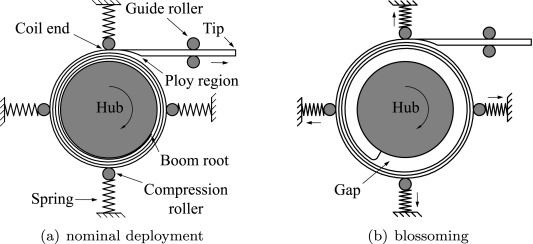
A critical failure mode known as "blossoming" occurred during deployment. This is a classic stored strain energy failure where the coil attempts to unwind faster than it can exit the housing mechanism.
Because the boom thickness was slightly greater than standard space-grade specs, the stored potential energy was higher than anticipated. In the confined space of the hub, this caused the coil to expand radially outward, pressing hard against the casing walls and effectively locking the entire system up instantly.
Additionally, the 3D-printed cross-section guide created excessive friction, further hindering smooth deployment.
Mitigation Strategies
There are several established methods to mitigate blossoming, as researched by Caltech and others in the field. These include radial force stabilization (using rollers to constrain the coil) and pressure stabilization.
Another effective technique involved modifying the motor control logic. By rapidly running the motor backwards to tighten the coil and then slowly feeding it forward, we could momentarily break the static friction and prevent the "stick-slip" behavior that leads to blossoming.
Future Improvement Note: While the current prototype relied on manual control to manage this deployment sequence, a robust flight version would likely require a closed-loop stepper motor algorithm. This would allow for precise real-time adjustment of the tension and feed rate to automatically counteract blossoming onset.
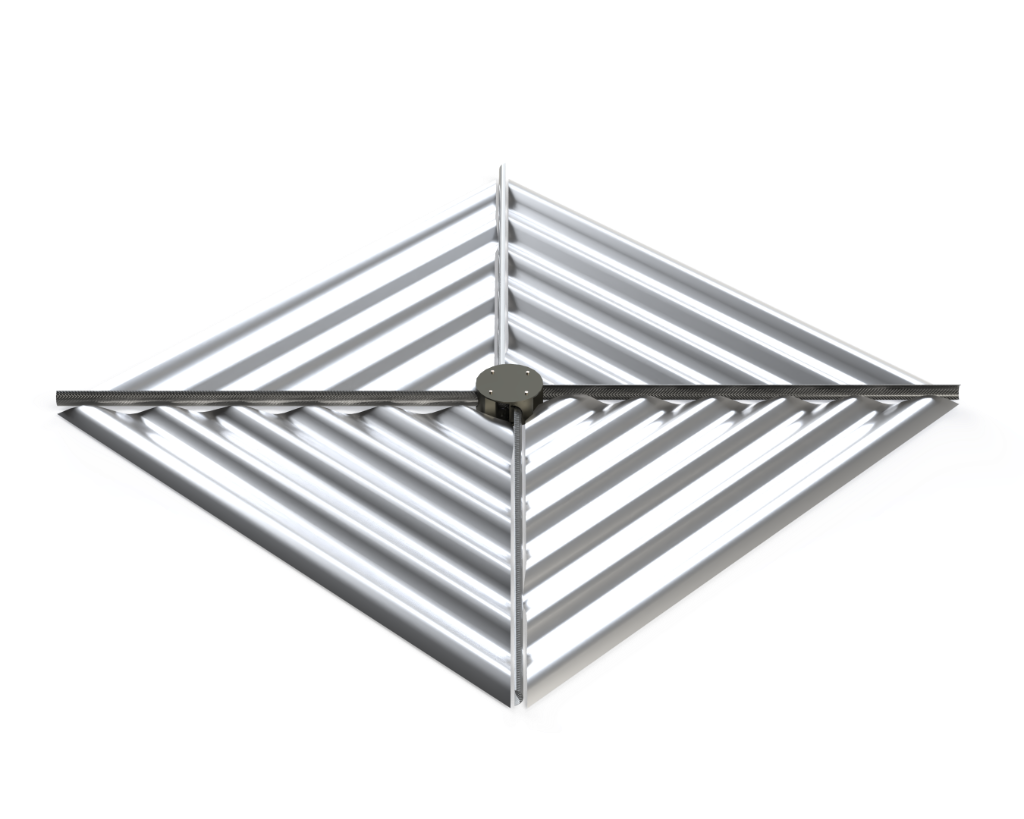
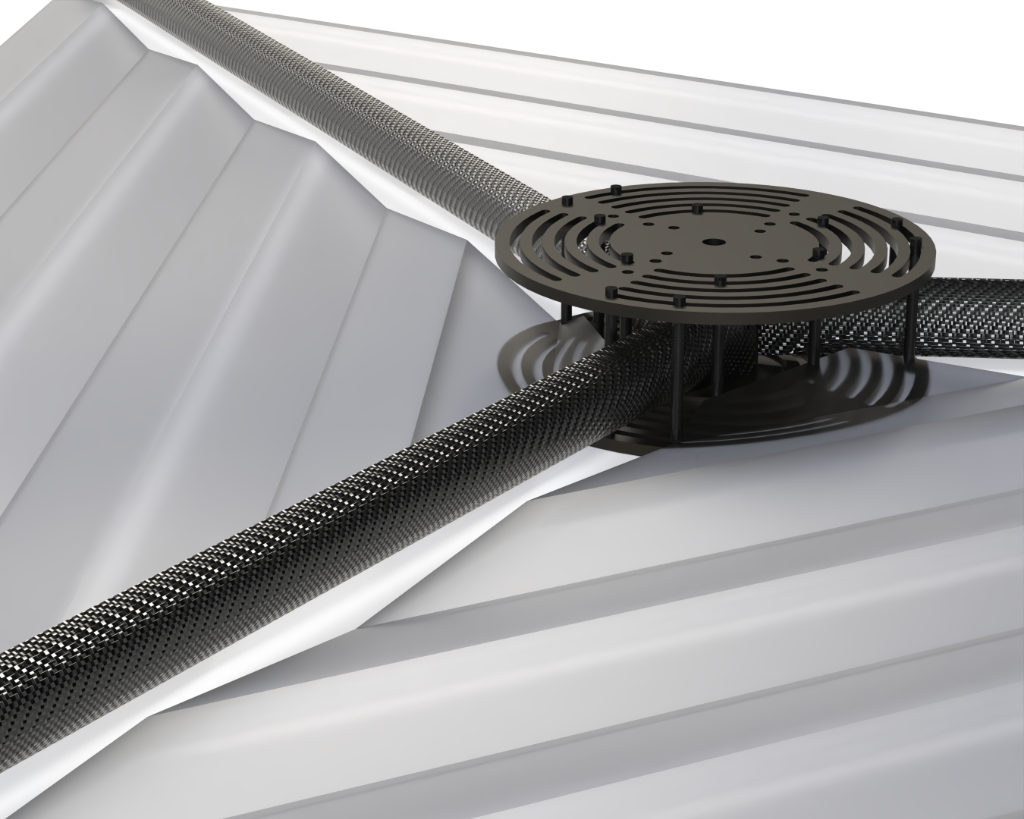
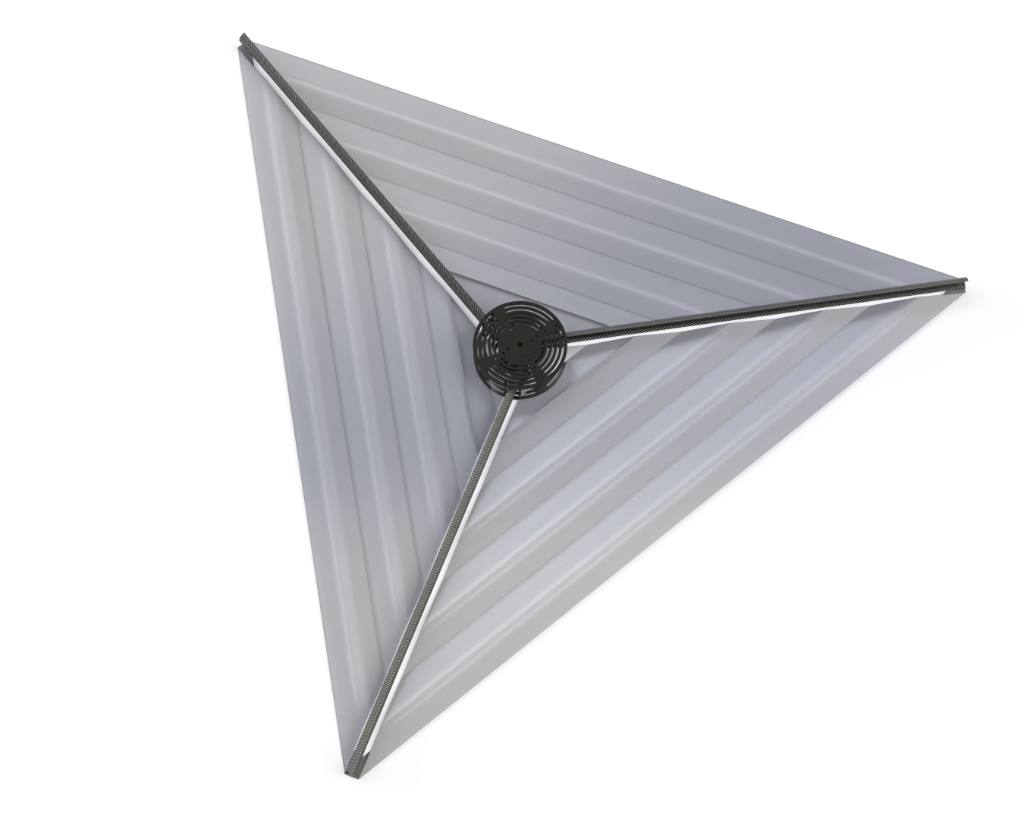
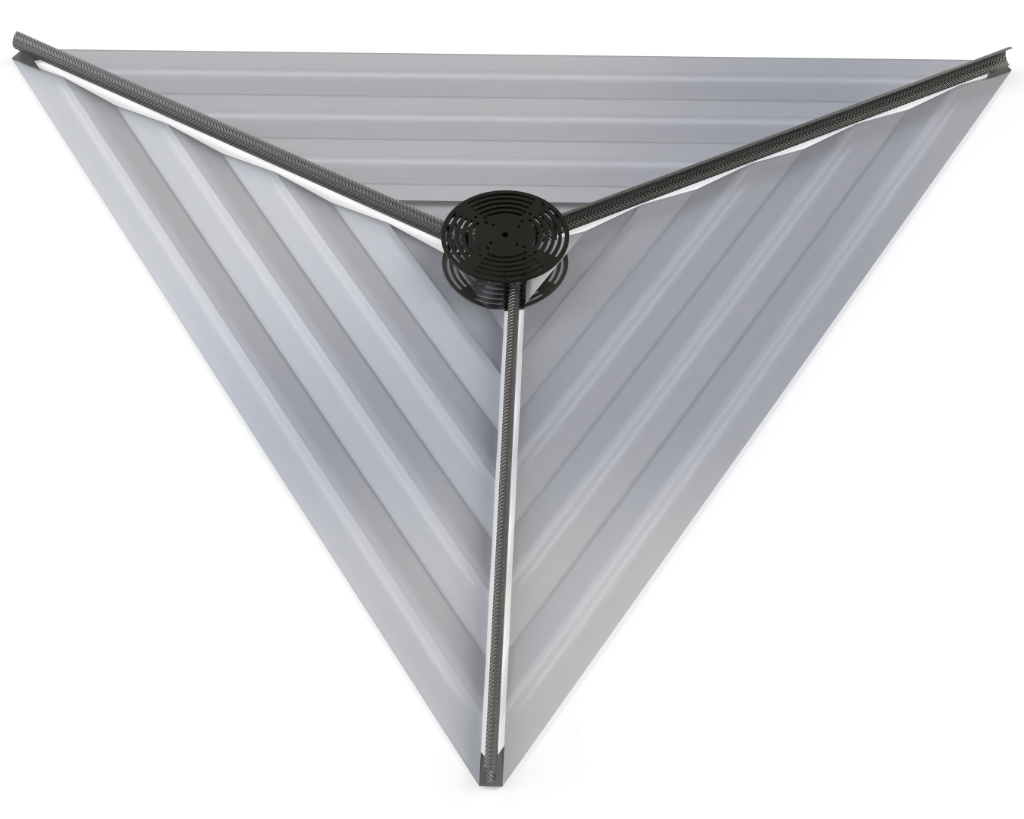
Revision 2: Tri-Boom & Carbon Rods
To resolve these issues, the design was simplified to a 3-boom configuration. This geometric change wasn't just an aesthetic choice; it increased the available stowage volume for each boom by over 30%, giving the mechanism much-needed "breathing room."
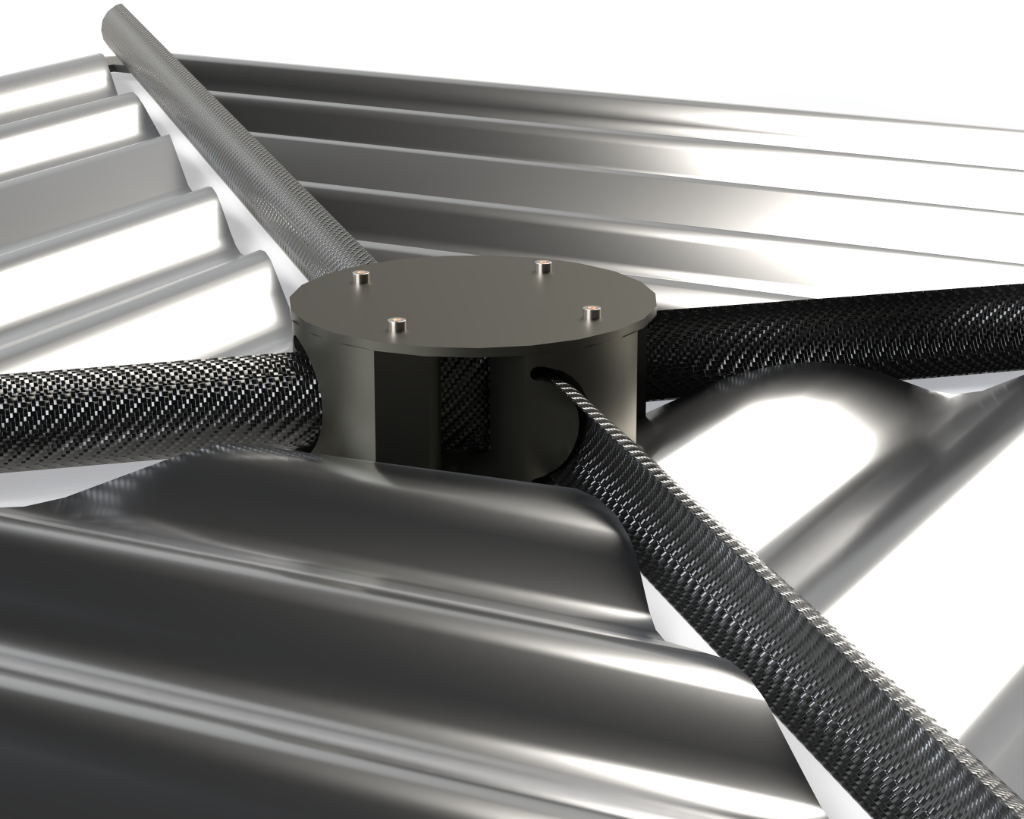
Crucially, I replaced the high-friction 3D printed guides with 3mm solid Carbon Fiber rods. This shifted the contact from a high-friction surface to a low-friction line contact.
Combined with the inherent stiffness of the rods, this reduced the deployment force requirements drasticallly. The rods are positioned precisely to constrain the coil, forcing it to deploy tangentially and physically preventing the "blossoming" expansion.
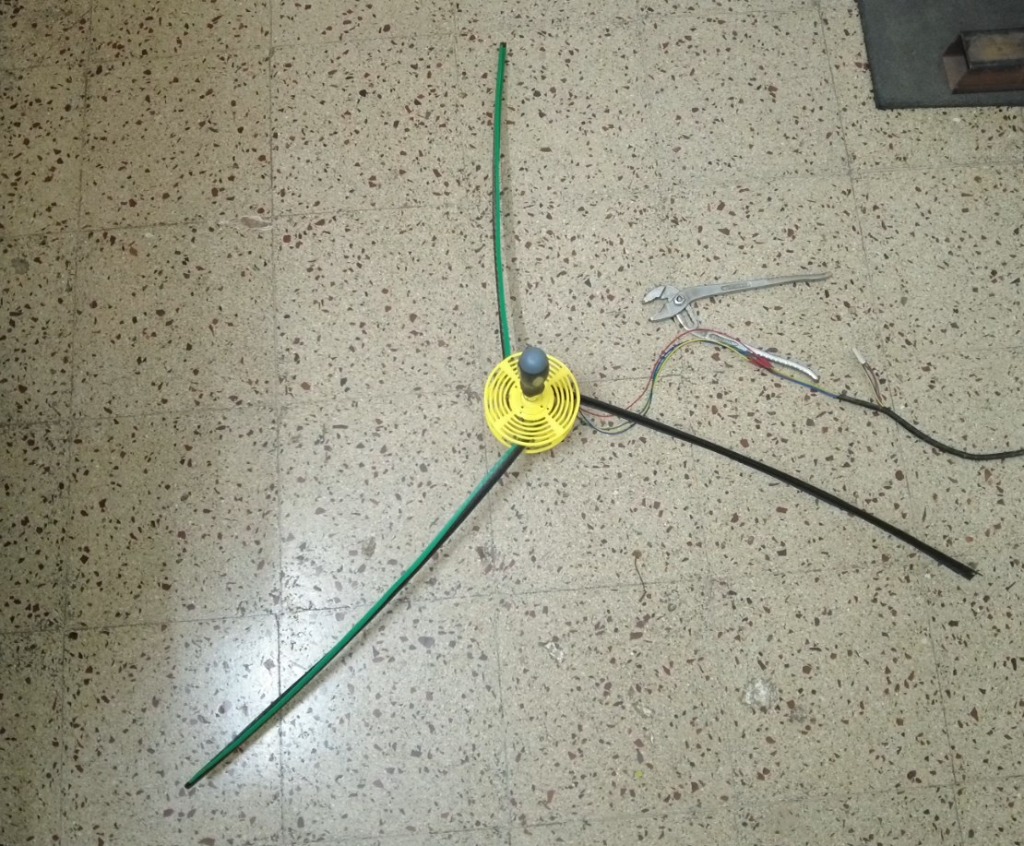
Prototype Deployment Sequence
Click play to see the frame-by-frame deployment of the physical prototype.




Render Gallery
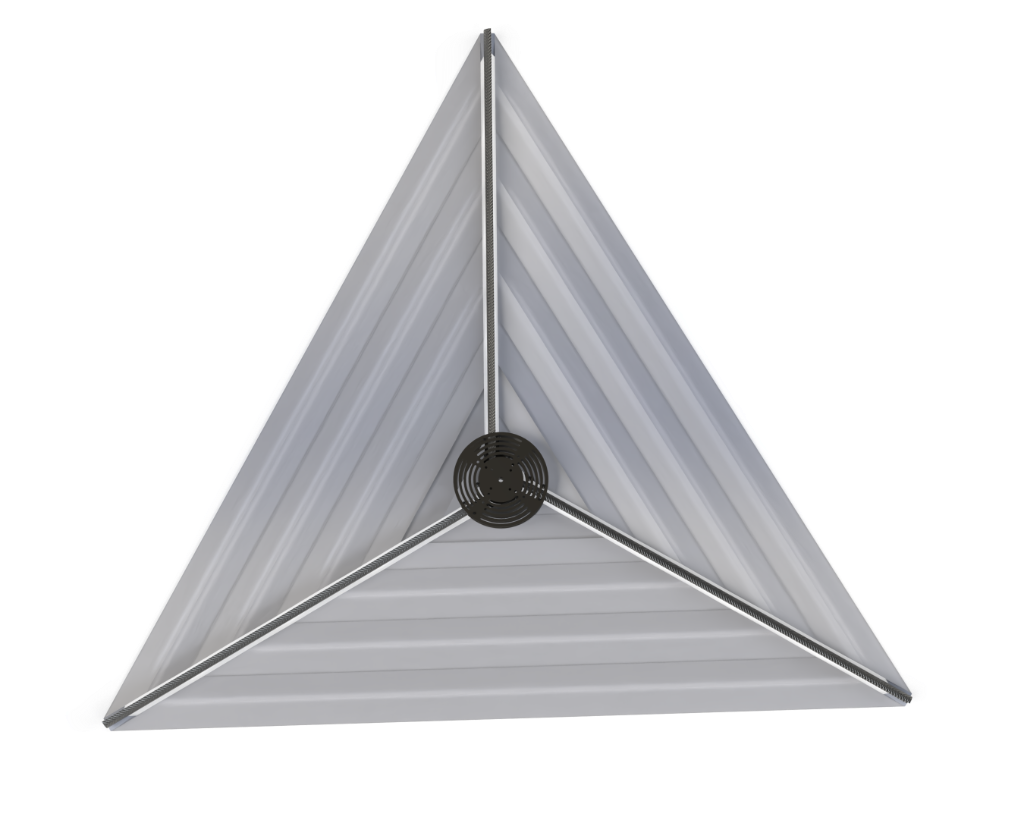
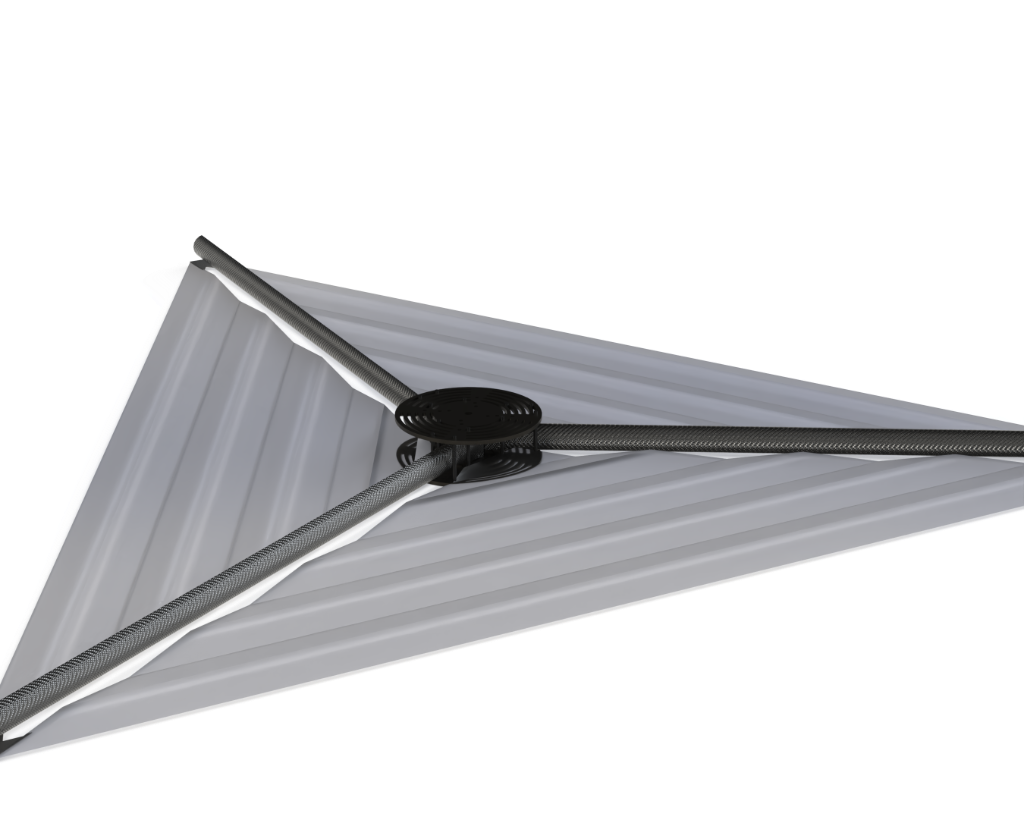
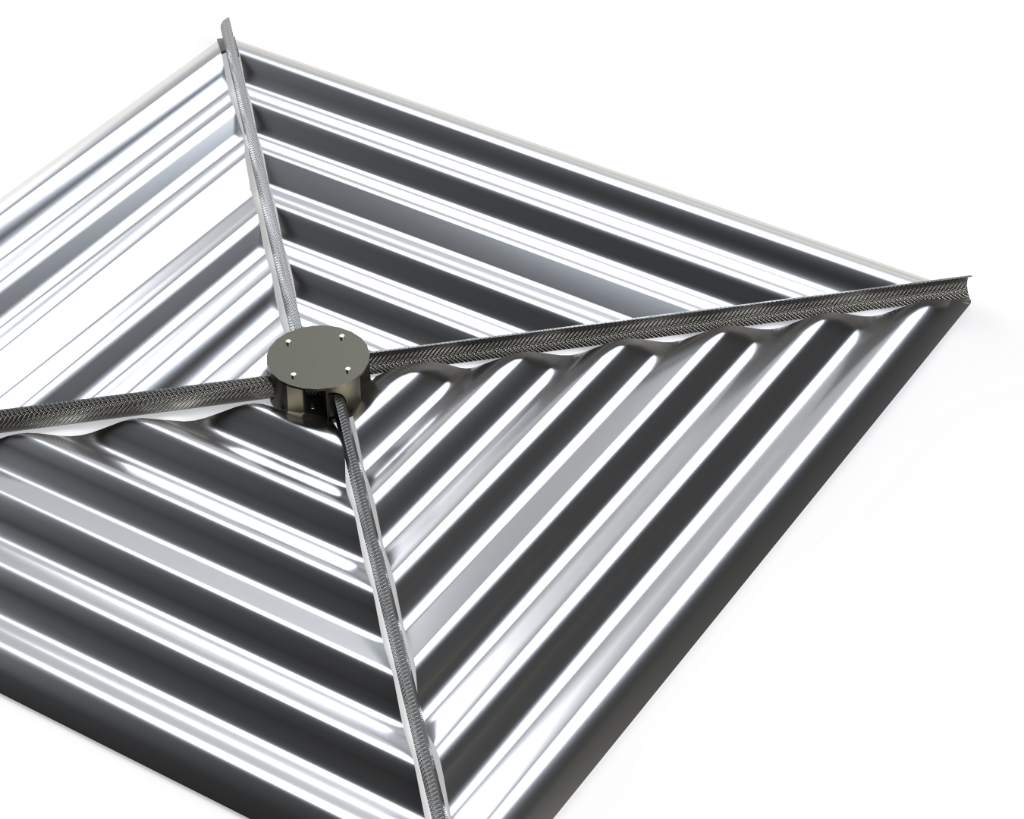
Note: Please excuse the visual artifacts in these renders. Simulating thin-film mechanics is a complex beast!